2021-01-20
1.MPU6050(자이로 가속도 센서)
MPU6050센서는 자이로 가속도 센서로 아두이노 우노에 연결하여 가속도를 측정하기 위해 작동 환경을 구성하였다.
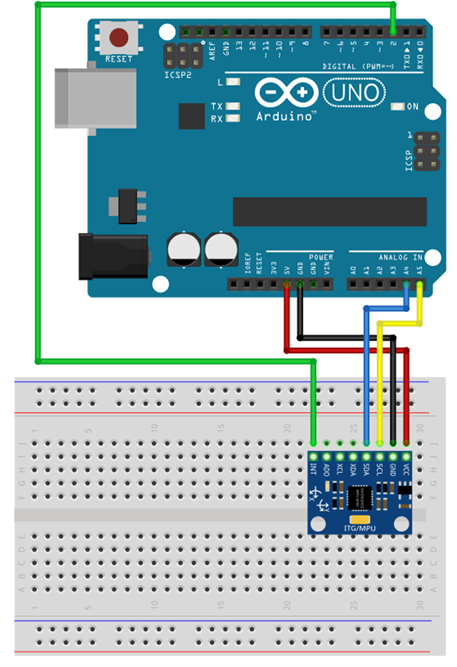
1-1. 아두이노 우노와 센서의 pin 연결.
실습현장:)
 크기 설정")
1-2. 라이브러리.
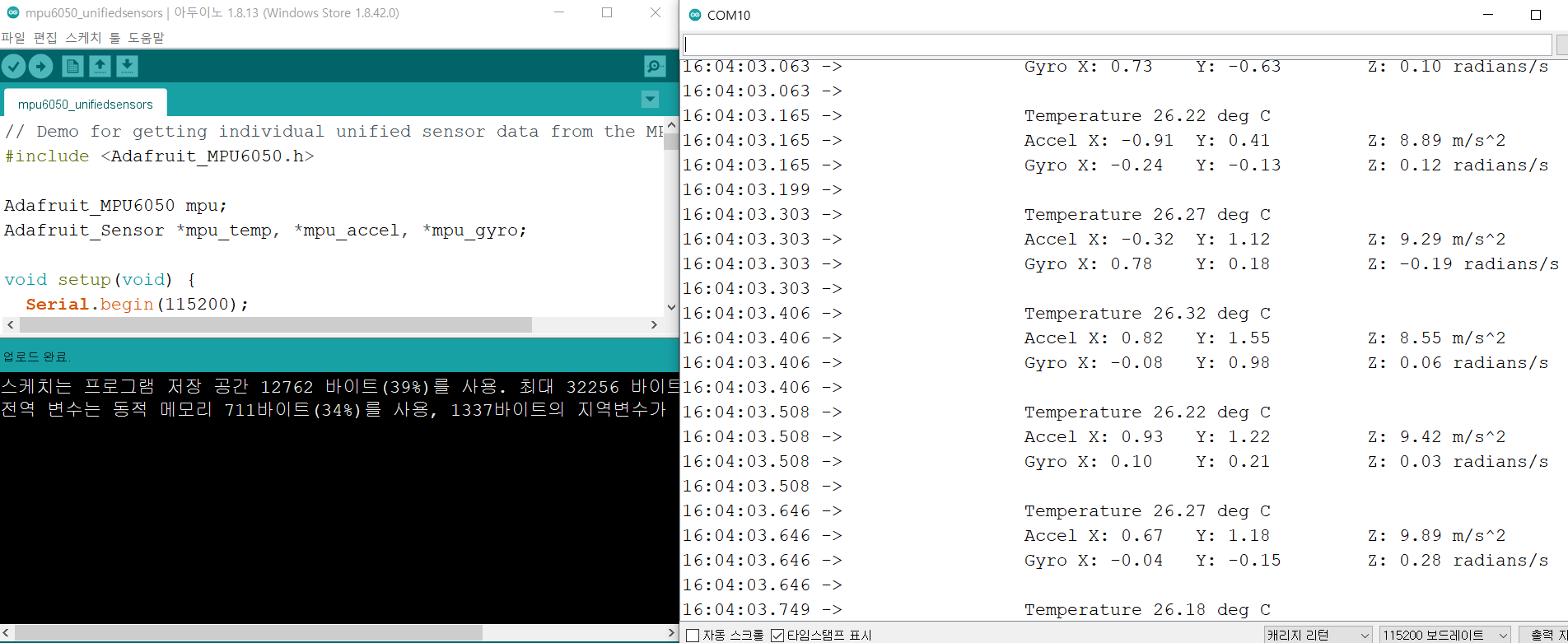
-아래사이트에서 라이브러리를 참조하였다. 가속도 센서는 라이브러리 예제중 mpu6050_unifiedsensors 사용하였고 소스코드는 다음과 같다.
소스코드, 라이브러리 참조 : https://blog.naver.com/eduino/221081288204
// Demo for getting individual unified sensor data from the MPU6050
#include <Adafruit_MPU6050.h>
Adafruit_MPU6050 mpu;
Adafruit_Sensor *mpu_temp, *mpu_accel, *mpu_gyro;
void setup(void) {
Serial.begin(115200);
while (!Serial)
delay(10); // will pause Zero, Leonardo, etc until serial console opens
Serial.println("Adafruit MPU6050 test!");
if (!mpu.begin()) {
Serial.println("Failed to find MPU6050 chip");
while (1) {
delay(10);
}
}
Serial.println("MPU6050 Found!");
mpu_temp = mpu.getTemperatureSensor();
mpu_temp->printSensorDetails();
mpu_accel = mpu.getAccelerometerSensor();
mpu_accel->printSensorDetails();
mpu_gyro = mpu.getGyroSensor();
mpu_gyro->printSensorDetails();
}
void loop() {
// /* Get a new normalized sensor event */
sensors_event_t accel;
sensors_event_t gyro;
sensors_event_t temp;
mpu_temp->getEvent(&temp);
mpu_accel->getEvent(&accel);
mpu_gyro->getEvent(&gyro);
Serial.print("\t\tTemperature ");
Serial.print(temp.temperature);
Serial.println(" deg C");
/* Display the results (acceleration is measured in m/s^2) */
Serial.print("\t\tAccel X: ");
Serial.print(accel.acceleration.x);
Serial.print(" \tY: ");
Serial.print(accel.acceleration.y);
Serial.print(" \tZ: ");
Serial.print(accel.acceleration.z);
Serial.println(" m/s^2 ");
/* Display the results (rotation is measured in rad/s) */
Serial.print("\t\tGyro X: ");
Serial.print(gyro.gyro.x);
Serial.print(" \tY: ");
Serial.print(gyro.gyro.y);
Serial.print(" \tZ: ");
Serial.print(gyro.gyro.z);
Serial.println(" radians/s ");
Serial.println();
delay(100);
/* serial plotter friendly format
Serial.print(temp.temperature);
Serial.print(",");
Serial.print(accel.acceleration.x);
Serial.print(","); Serial.print(accel.acceleration.y);
Serial.print(","); Serial.print(accel.acceleration.z);
Serial.print(",");
Serial.print(gyro.gyro.x);
Serial.print(","); Serial.print(gyro.gyro.y);
Serial.print(","); Serial.print(gyro.gyro.z);
Serial.println();
delay(10);
*/
}
1-3 결과
성공적으로 가속도를 측정함으로써 MPU6050 센서의 작동 환경을 구성하였다.
2.HCM5883L (지자계센서)
HCM5883L센서는 지구의 자기장을 이용하는 지자계센서로 아두이노 우노에 연결하여 향하는 방향을 측정하기위해 작동환경을 구성하였다.
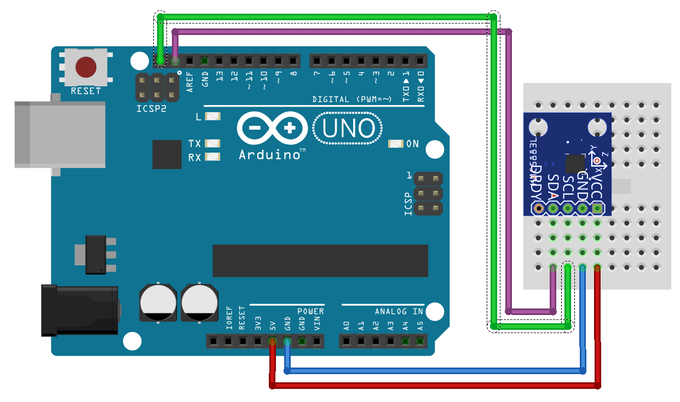
1-1. 아두이노 우노와 센서의 pin 연결
실습현장:)
 크기 설정")
1-2. 라이브러리.
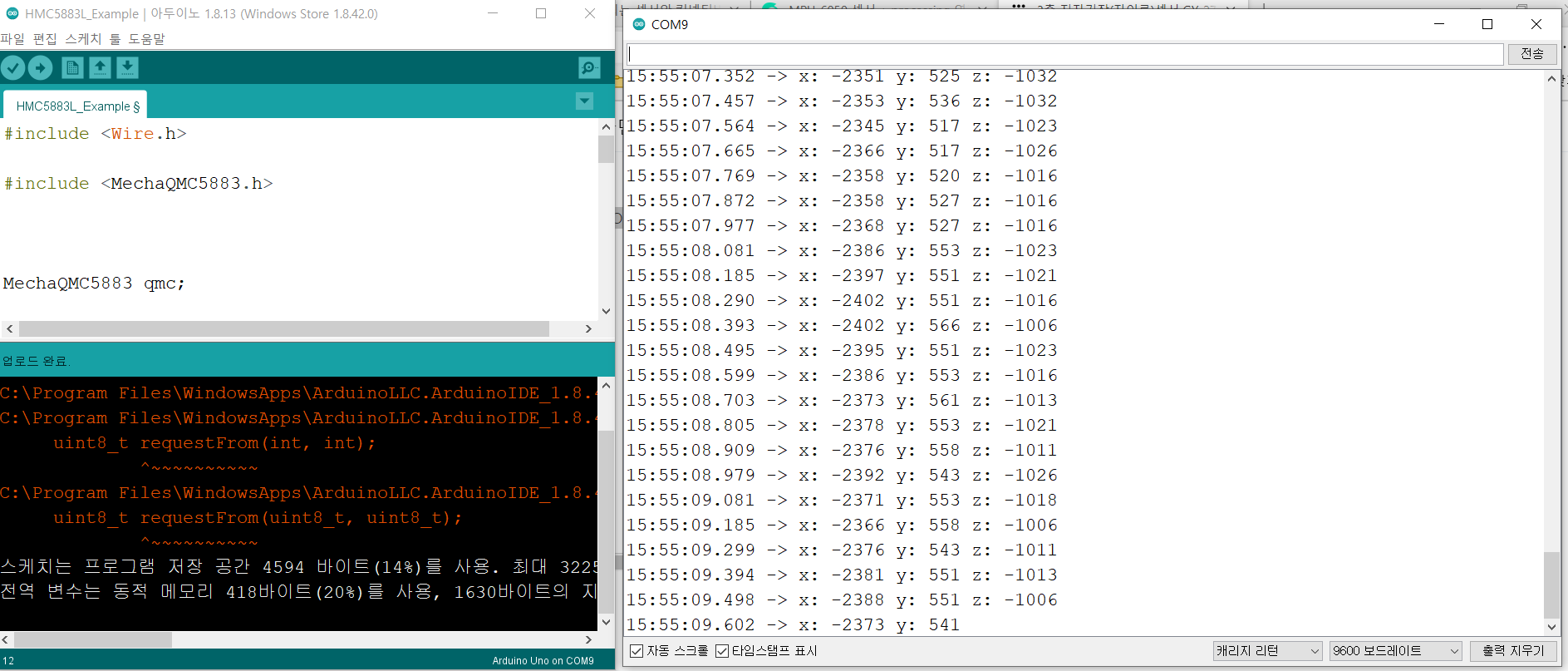
-아래사이트에서 라이브러리를다운받아 사용하였다. 자기장센서의 소스코드는 다음과 같다.
소스코드, 라이브러리 참조 : https://blog.naver.com/roboholic84/221002707148
#include <Wire.h>
#include <MechaQMC5883.h>
MechaQMC5883 qmc;
void setup() {
Wire.begin();
Serial.begin(9600);
qmc.init();
//qmc.setMode(Mode_Continuous,ODR_200Hz,RNG_2G,OSR_256);
}
void loop() {
int x,y,z;
qmc.read(&x,&y,&z);
Serial.print("x: ");
Serial.print(x);
Serial.print(" y: ");
Serial.print(y);
Serial.print(" z: ");
Serial.print(z);
Serial.println();
delay(100);
}
1-3. 오류
-계속 같은 값만 출력되어 해결방법을 찾아보았다.(센서 인식의 문제?)
- 주소에러 -> I2C통신방식으로 소스 코드에서는 주소가 0x1E 였는데
- 주소를 확인를 이용해 확인해본 결과 0x0D의 주소를 사용하고있었다.
- 주소 코드 0X0D로 수정
주소확인코드
// --------------------------------------
// i2c_scanner
// Version 1
// This program (or code that looks like it)
// can be found in many places.
// For example on the Arduino.cc forum.
// The original author is not know.
// Version 2, Juni 2012, Using Arduino 1.0.1
// Adapted to be as simple as possible by Arduino.cc user Krodal
// Version 3, Feb 26 2013
// V3 by louarnold
// Version 4, March 3, 2013, Using Arduino 1.0.3
// by Arduino.cc user Krodal.
// Changes by louarnold removed.
// Scanning addresses changed from 0...127 to 1...119,
// according to the i2c scanner by Nick Gammon
// https://www.gammon.com.au/forum/?id=10896
// Version 5, March 28, 2013
// As version 4, but address scans now to 127.
// A sensor seems to use address 120.
// Version 6, November 27, 2015.
// Added waiting for the Leonardo serial communication.
// This sketch tests the standard 7-bit addresses
// Devices with higher bit address might not be seen properly.
#include <Wire.h>
void setup()
{
Wire.begin();
Serial.begin(9600);
while (!Serial); // Leonardo: wait for serial monitor
Serial.println("\nI2C Scanner");
}
void loop()
{
byte error, address;
int nDevices;
Serial.println("Scanning...");
nDevices = 0;
for(address = 1; address < 127; address++ )
{
// The i2c_scanner uses the return value of
// the Write.endTransmisstion to see if
// a device did acknowledge to the address.
Wire.beginTransmission(address);
error = Wire.endTransmission();
if (error == 0)
{
Serial.print("I2C device found at address 0x");
if (address<16)
Serial.print("0");
Serial.print(address,HEX);
Serial.println(" !");
nDevices++;
}
else if (error==4)
{
Serial.print("Unknown error at address 0x");
if (address<16)
Serial.print("0");
Serial.println(address,HEX);
}
}
if (nDevices == 0)
Serial.println("No I2C devices found\n");
else
Serial.println("done\n");
delay(5000); // wait 5 seconds for next scan
}
- 시리얼 포트 파라미터 설정중 에러
-하드웨어 연결부분 다시 재연결로 문제를 해결하였다. 기본적인 부분에서도 문제가 발생하기 쉬우니 주의하기 !
hmC짝퉁
-열심히 찾아보며 오류를 해결하려고 하였으나 QMC » xyz 값 -1로 계속 같은 값만 나오며 해결하지 못했다. 그러다 참조사이트를 통해 이러한 오류를 접하는 사람들이 여럿 있다는 것을 알게되었다.
이러한 문제는 HMC5883L센서가 정품이 아니여서 정품을 기준으로 한 오픈소스코드가 맞지 않기 때문이다. 그래서 참조사이트에서 정품이 아닌 QMC센서의 라이브러리 다운받아서 실행해보니 문제가 해결되었다.ㅜ
참조 사이트: https://clemencyking.tistory.com/m/4
1-3 결과
많은 오류를 해결하고 성공적으로 자기장에따른 방향을 측정함으로써 HMC5883L센서의 작동 환경을 구성하였다. 행복-